


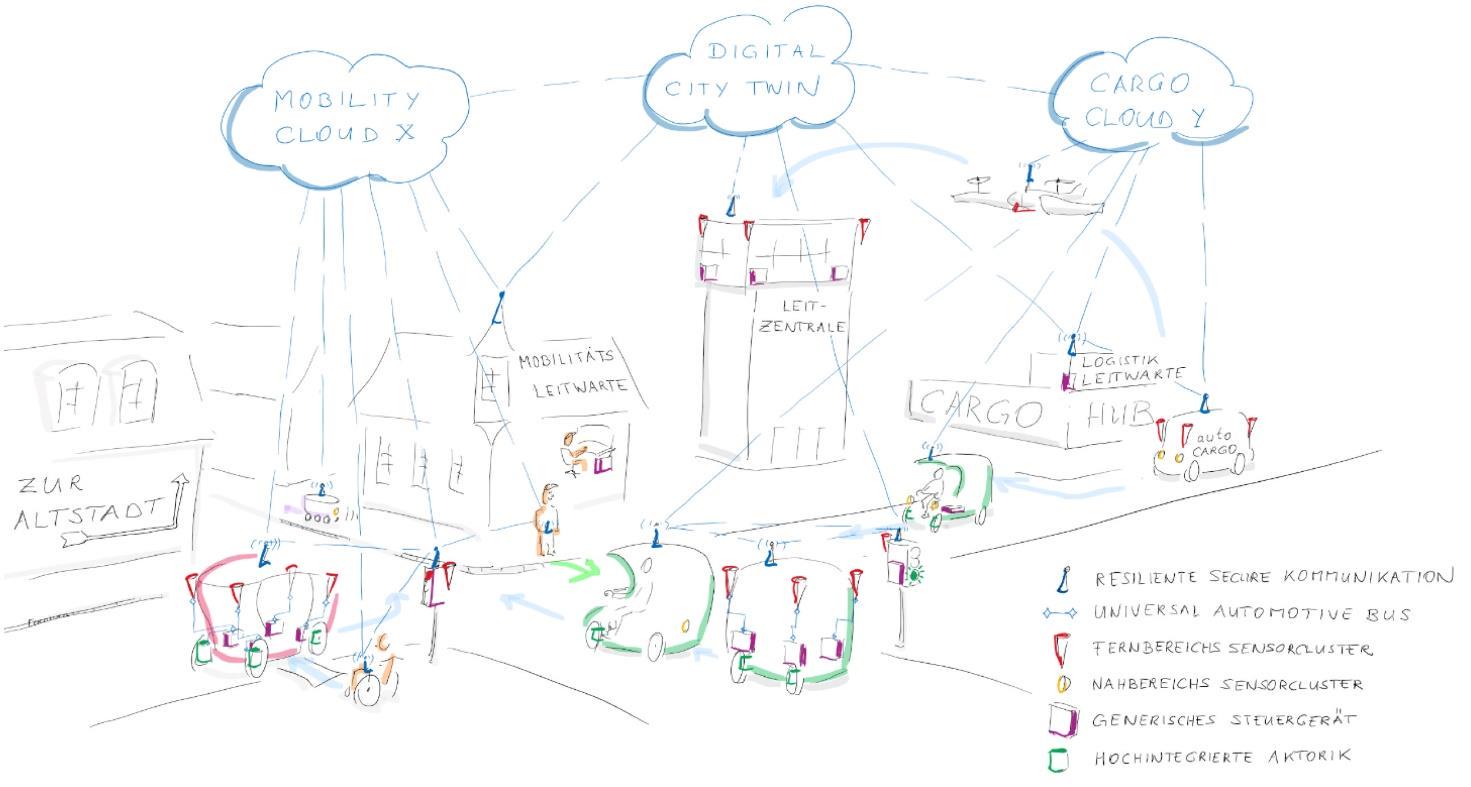
Funded by the German Federal Ministry of Education and Research (BMBF), the project is formed by a consortium of leading German universities, SMEs, and companies in the field of automated and connected driving. The project is based on the previous project UNICARagil, in which a modular architecture for automated vehicles was researched and developed. In autotech.agil, this architecture is to be extended beyond the vehicle boundaries and linked with validated concepts for roadside units, control rooms and the cloud. For this purpose, a modular kit of powerful and robust software modules is to be created that can be implemented both in the vehicle and in the supporting infrastructure. Based on the explicit communication of the capabilities of the individual modules in the form of a “quality vector”, a flexible distribution of intelligence in the system is possible. Thus, the use of intelligence outside the vehicle is also conceivable, so that other road users can benefit in addition to the automated vehicles.
The project will run for a period of three years up to September 2025. At FZD, four research associates are working on three different research topics in the areas of energy-efficient neuromorphic perception, function development of automated low-speed functions and modular (AI) assurance.



