

“Automated Trucking Darmstadt” – ATDa for short – is a research cooperation between the Institute of Automotive Engineering (FZD) at the Technical University of Darmstadt and the commercial vehicle manufacturer Daimler Truck AG. Assisted and automated driving is an ongoing trend in the automotive industry, which is justified not only in the passenger car sector, but also in the commercial vehicle sector for reasons of road safety and efficiency, among others. Trucks offer particular potential for assistance and automation, as they are often driven over long distances and different route profiles (highways, country roads, city streets) by a single driver. Assistance and automation functions offer the possibility of relieving or supporting the driver in the safe execution of the driving task in a targeted manner, or even relieving them completely under special conditions. These advantages of assisted and automated driving are the motivation for the ATDa research cooperation.
Two projects are being worked on within the ATDa research cooperation. One project focuses on driver assistance for demanding, truck-specific driving maneuvers such as driving through a traffic circle. The other project is researching various machine learning-supported methods for recognizing free spaces. Both projects have a joint test vehicle from Daimler Truck AG at their disposal, which is driven both on public roads and on a closed test site.
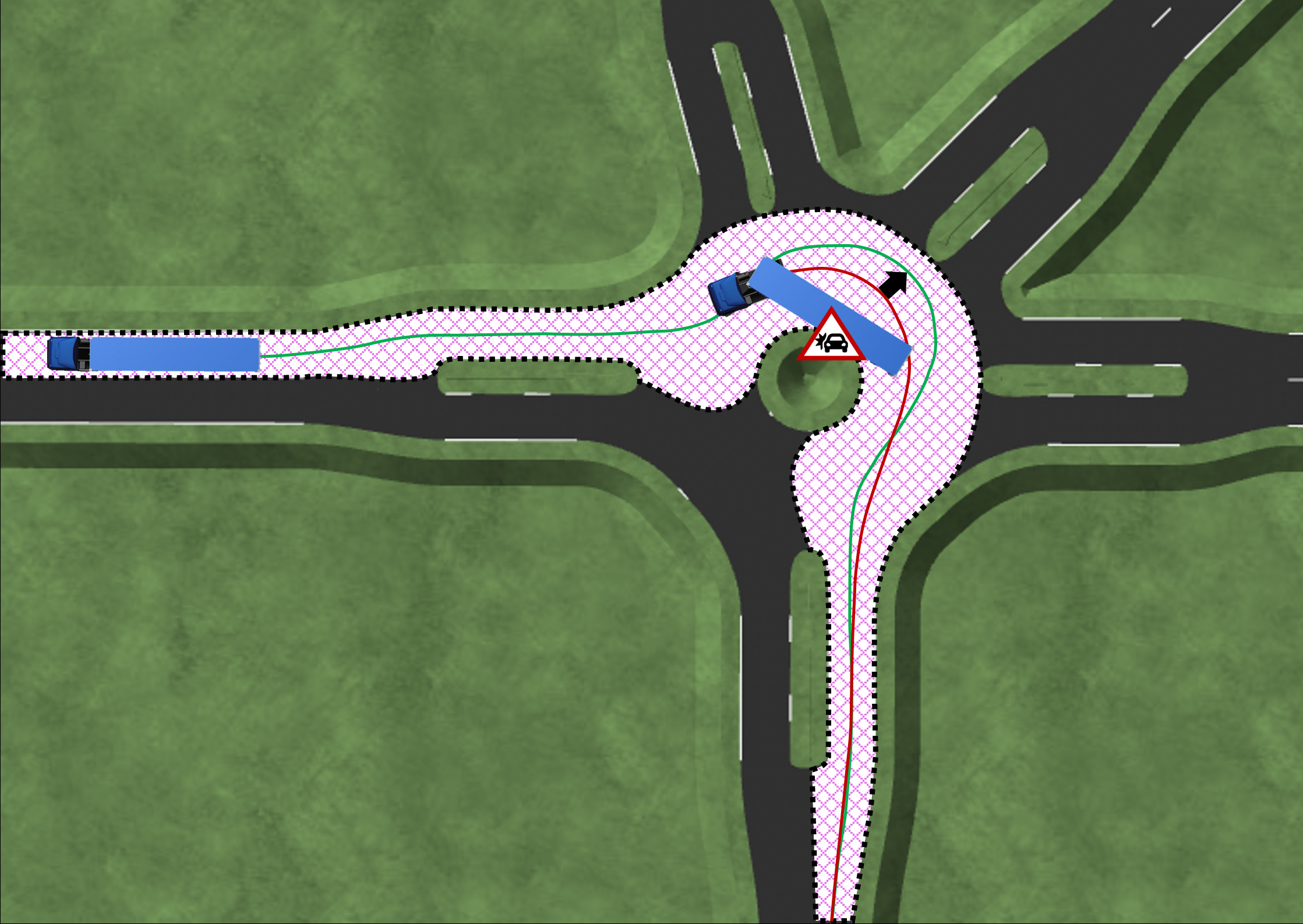
The construction of roundabouts at a later stage, particularly in urban areas, often results in undersized roundabouts due to the limited available space. Furthermore, the time pressure and the occasional lack of experience or unawareness of drivers contribute to the occurrence of minor accidents. Nevertheless, these incidents frequently result in significant consequences and substantial costs.
To address this issue, this project is analyzing map data and developing a trajectory planner. In the future this should assist the driver in avoiding collisions with the infrastructure when driving through roundabouts. During the course of this project, the entire pipeline for the development of the roundabout assistant, as well as the system architecture of such a system, will be examined.
The focus is on planning a collision-free trajectory through a roundabout. To this end, a simulation pipeline will be set up.
This research topic is being investigated by Jan Staab.
Truck accidents often occur because drivers misjudge the drivable space around the vehicle, resulting in collisions with road infrastructure. These incidents can result in expensive repairs or even the need to scrap vehicles, driving up costs for freight transportation companies.
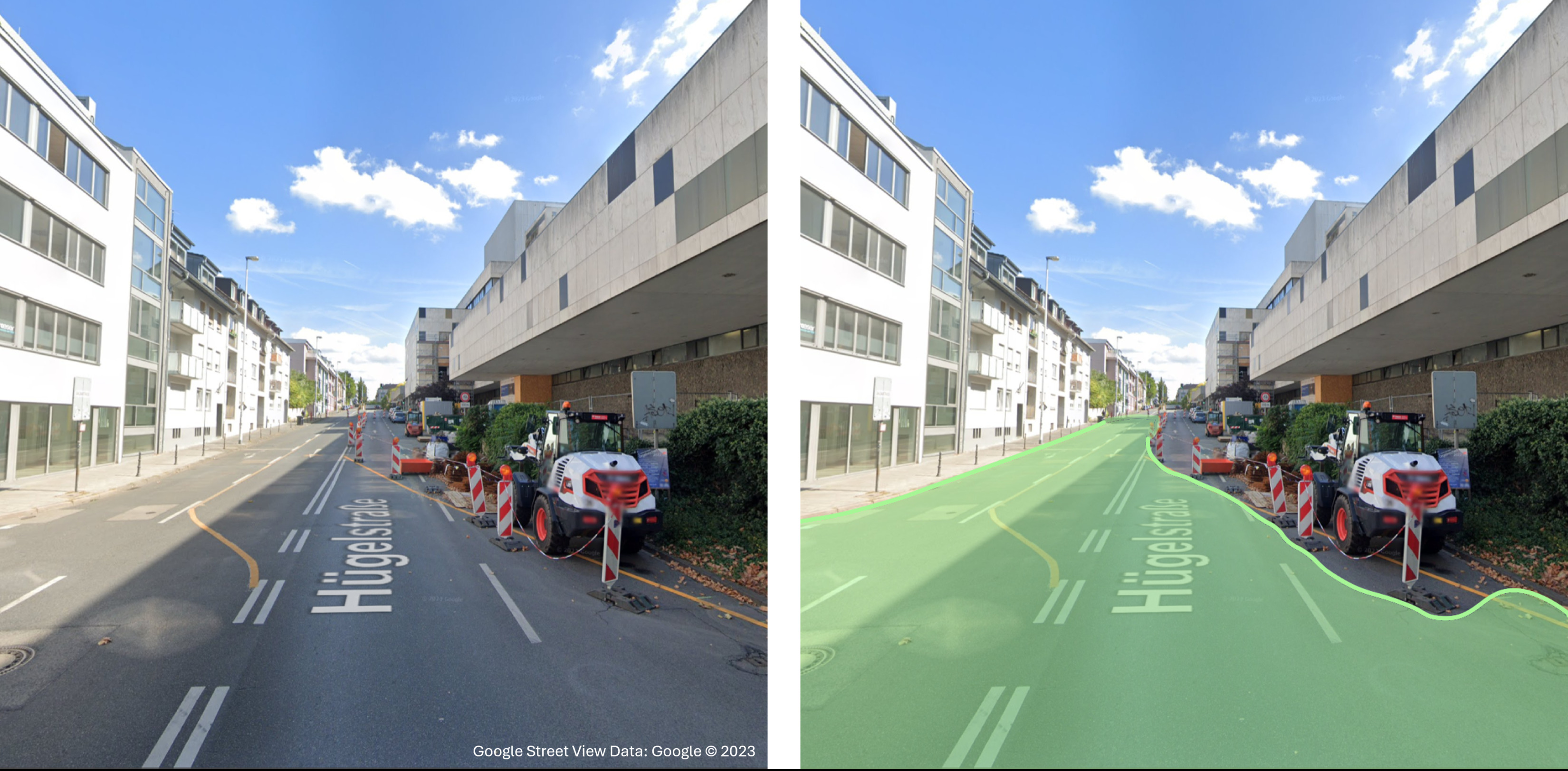
The project aims to detect and calculate the available space around the vehicle to improve safety for truck drivers and other road users. This research focuses on developing a free space detection function using various automotive sensors, including cameras, lidars, and radars.
For that, different relevant use cases will be considered and the function's requirements will be derived. The goal is to help drivers identify potential obstacles on the road, such as lost cargo, bridges, and other road users, thereby improving overall road safety.
This research topic is being investigated by Cristian Martinez.
Today, machine-learned systems are considered indispensable as an aspect of the automation of road vehicles. They are characterized by their enormous performance, especially in the interpretation of video images. They are therefore also required as part of the research work in ATDa in order to be able to answer the open questions regarding the possibilities of automation. Machine learning is a data-driven approach. First, as much different data as possible, including personal data (camera data), is collected so that the algorithm that is later learned has already seen a large number of variants and therefore works reliably. Once the data has been collected, the learning program is shown images and “rewarded” for correct recognition and “punished” for incorrect recognition. After the algorithm has finished learning, it is applied to data that it has never seen before for testing purposes. This makes it possible to check whether the algorithm will also work in subsequent operation.
It is not possible to anonymize the camera data, for example by pixelating personal data, as this would result in a partially pixelated environment being learned and the algorithm would therefore have difficulties in correctly recognizing people and vehicles in particular, which would ultimately lead to safety-critical system failure.
Learn more about your data protection in the following FAQ section.
The following frequently asked questions concern data protection of the ATDa research cooperation. As the research activities take place in Germany, all relevant questions are answered in German language.
Wer ist verantwortlich für die Datenerhebung?
Die Erhebung der Daten erfolgt durch das Fachgebiet Fahrzeugtechnik der Technischen Universität Darmstadt. Verantwortliche im Sinne des Art. 13 DSGVO ist:
Technische Universität Darmstadt, vertreten durch die Präsidentin
Professor Dr. Tanja Brühl
Karolinenplatz 5
64289 Darmstadt
praesidentin@tu-darmstadt.de
Wer ist der Datenschutzbeauftragte für das Projekt?
Datenschutzbeauftragter der Technischen Universität Darmstadt
Karolinenplatz 5
64289 Darmstadt
datenschutz@tu-darmstadt.de
Den Datenschutzbeauftragten der Technischen Universität Darmstadt erreichen Sie außerdem unter https://www.tu-darmstadt.de/datenschutz/
Zu welchem Zweck und mit welcher Rechtsgrundlage werden die Daten erhoben und verarbeitet?
Die Daten werden zur Grundlagenforschung im Bereich des assistierten und automatisierten Fahrens für Lkw erhoben. Die Forschung erfolgt nach § 24 HDSIG und Art. 6 Abs. 1 e DSGVO. Weitere Rechtsgrundlagen sind: §§ 3 | 4 | Nr. 1 HDSIG.
Wer hat Zugriff auf die Daten?
Zugriff auf die Daten haben nur projektbeteiligte Mitarbeitende der TU Darmstadt und der Projektpartner Daimler Truck AG. Die Weitergabe der Daten an die Daimler Truck AG und damit auch die Gewährleistung der Sicherheit in der Datenverarbeitung ist über einen Auftragsdatenverarbeitungsvertrag geregelt. Ausgewählte Datensätze werden zudem in anonymisierter Form mit Partnern aus der Wissenschaft, die an vergleichbaren Themenstellungen arbeiten, geteilt. Auch im Falle eines Unfalls/ einer Straftat werden die Daten aufgrund des Datenschutzes nur auf richterliche Anordnung mit den zuständigen Behörden geteilt.
Wie lange werden die Daten gespeichert?
Die Daten werden so lange gespeichert, wie diese in Forschung und Entwicklung des assistierten und automatisierten Fahrens für Lkw zu Trainings- und Validierungszwecken erforderlich sind und verwendet werden.
Welche Rechte haben Sie?
Recht auf Auskunft, Berichtigung, Einschränkung, Datenübertragbarkeit, Widerspruch: Da wir innerhalb der personenbezogenen Daten keine Identifikation, Erkennung oder Zuweisung von erfassten Personen vornehmen, können wir Ihnen auch nicht mitteilen, ob Sie gefilmt worden sind oder nicht. Daher sind auch keine Änderungen an den Daten oder deren Verwendung möglich.
Recht auf Löschung: Aus den oben angeführten Gründen ist auch keine vorzeitige Löschung möglich. Die Löschung ganzer Datensätze erfolgt in jedem Fall nach der Zweckerfüllung der Forschung, weshalb das „Recht auf Vergessenwerden“ nach DSGVO Artikel 17 Abs. 3 lit. d für die Dauer der Forschung zur Verwirklichung der Ziele eingeschränkt ist. Vergleichen Sie auch den Abschnitt „Kann ich mich aus den Daten löschen lassen?“
Werde ich anhand der Daten identifiziert?
Nein: Innerhalb der Forschungskooperation ATDa werden die Daten ausschließlich zur Erforschung und Unterstützung von Assistenz- und (teil-)automatisierten Fahrfunktionen erhoben und genutzt. Daten werden nicht genutzt, um Personen, Kennzeichen o.ä. zuzuordnen oder gar zu identifizieren. Es liegt weder in unserem Interesse, Merkmale auszuwerten, die zu einer Identifikation genutzt werden könnten, noch die Daten mit Datenbanken oder Personenbeschreibungen abzugleichen. Mitarbeiter des Fachgebietes Fahrzeugtechnik oder das Projekt unterstützende Studierende können bei Bedarf vereinzelte Abschnitte der Daten zu Forschungszwecken einsehen – der größte Anteil der Daten wird jedoch nur vom Computer, ohne menschliches Betrachten der Daten, verarbeitet. Die entsprechenden Mitarbeiter und Studierenden sind zur Verschwiegenheit und Geheimhaltung des Gesehenen verpflichtet.
Kann man nicht auf die Kameras zur Erfassung des Umfeldes verzichten?
Nein: Das heutige Verkehrskonzept ist vollständig auf die visuelle Wahrnehmung (z. B. Lichtsignalanlagen, Verkehrszeichen) durch den Menschen ausgelegt. Um diese Informationsquellen auch von automatisierten Systemen zu erfassen und zu verarbeiten sind Kameras unersetzlich.
Welche Daten werden erhoben?
Im Rahmen von ATDa werden zur Erforschung und dem Nachweis der Funktionen die Daten von Radar-, Lidar-, GNSS-Positionsdaten sowie Videodaten von Kameras erhoben.
Was geschieht mit den Daten?
Die Daten werden entsprechend dem Stand der Technik bereits bei der Aufnahme digital verschlüsselt und zusätzlich mechanisch vor unbefugten Zugriffen im Lkw geschützt. Unmittelbar nach den Aufzeichnungsfahrten werden die verschlüsselten Daten durch den Ausbau der Datenträger von Mitarbeitern des Fachgebietes auf den fachgebietsinternen Speicher übertragen. Dort werden sie im Rahmen der Funktionsentwicklung und Funktionsprüfung zu Forschungszwecken hinsichtlich des assistierten und automatisierten Fahrens genutzt. Dazu werden verschiedene Methoden wie beispielweise das datengetriebene maschinelle Lernen eingesetzt. Dabei können Mitarbeiter des Fachgebietes Fahrzeugtechnik, der Projektpartner Daimler Truck AG und das Projekt unterstützende Studierende bei Bedarf vereinzelte Abschnitte der Daten zu Forschungszwecken einsehen – der größte Anteil der Daten wird jedoch nur vom Computer, ohne menschliches Betrachten der Daten, verarbeitet. Die entsprechenden Mitarbeiter und Studierenden sind zur Verschwiegenheit und Geheimhaltung des Gesehenen verpflichtet.
Werden die Daten veröffentlicht?
Es werden keine personenbezogenen Daten veröffentlicht. Sollen zur Anschauung in wissenschaftlichen Beiträgen auf geeigneten Plattformen einzelne Ausschnitte oder Standbilder gezeigt werden, so werden die Daten im Vorfeld anonymisiert (bspw. Verpixelung von Kennzeichen und Gesichtern).
Wo und wie werden die Daten gespeichert?
Personenbezogene Daten werden während der Aufnahmen im Lkw gesichert. Dort werden Sie bereits beim Speichervorgang verschlüsselt und sind auch mechanisch vor unbefugtem Zugriff geschützt. Direkt im Anschluss an die Datenerhebung werden die Daten von Mitarbeitern des Fachgebietes Fahrzeugtechnik durch den Ausbau der Datenträger aus dem Lkw auf den internen Datenspeicher des Fachgebietes Fahrzeugtechnik übertragen. Auch dort sind die Daten weiterhin verschlüsselt. Neben der Weitergabe der Daten an den Projektpartner Daimler Truck AG erfolgen keine weiteren Kopien von personenbezogenen Daten auf externen Speichermedien, USB-Sticks oder ähnlichen Datenträgern.
Sind die Daten verschlüsselt?
Ja: Sowohl im Lkw als auch auf dem Server des Fachgebietes sowie beim Projektpartner Daimler Truck AG werden die Daten verschlüsselt gesichert.
Kann ich mich aus den Daten löschen lassen?
Nein: Sowohl aus wissenschaftlicher Sicht als auch datenschutzrechtlicher Sicht nehmen wir keinerlei Identifizierung oder Zuordnung von Personen vor. Wir gleichen die Daten nicht mit Datenbanken, Gesichtserkennungssoftware, Personenbeschreibungen oder Ähnlichem ab. Daher bitten wir Sie auch um Verständnis, dass wir Sie nicht zuordnen können und somit eine gezielte Löschung unmöglich ist. Eine pauschalisierte Löschung ganzer Datenabschnitte kann nicht vorgenommen werden, da diese unweigerlich dazu führen würde, dass das Forschungsvorhaben entsprechend DSGVO Artikel 17 Abs. 3 lit. d nicht umgesetzt werden könnte. Die untersuchten Algorithmen und Funktionen wären bei gelernten Verfahren nicht gleichwertig und zusätzlich nicht wissenschaftlich eindeutig vergleichbar, wenn sie immer mit anderen oder reduzierten Datenabschnitten getestet werden müssten.
Werden die Daten zur Aufklärung von Unfällen oder Straftaten verwendet?
Nein: Die personenbezogenen Daten werden ausschließlich zu den oben genannten wissenschaftlichen Forschungszwecken verwendet. Darüber hinaus werden personenbezogene Daten nur auf richterlichen Beschluss an Dritte weitergegeben.
An wen kann man sich für mehr Informationen wenden?
Sollten Sie noch Fragen haben, so können Sie sich gerne, bevorzugt per E-Mail, an die projektbeteiligten Mitarbeiter des Fachgebietes Fahrzeugtechnik wenden:

